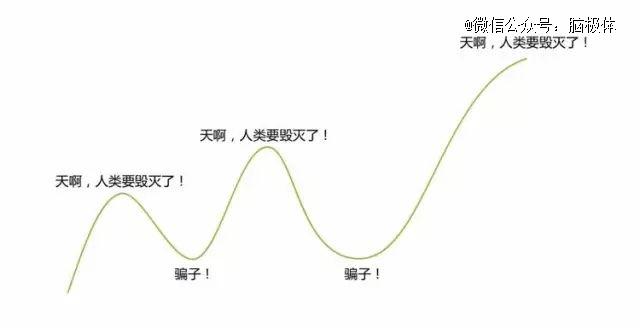
李开复曾提到过一个AI界流传的“骗子又来了曲线”。 人会不断给机器进行“是否具有人类智能”的鉴定,而这个过程,总是从被人工智能在某些领域的惊艳表现震撼,到逐渐认识到当时的人工智能还有各种局限,以至于产生巨大心理落差。
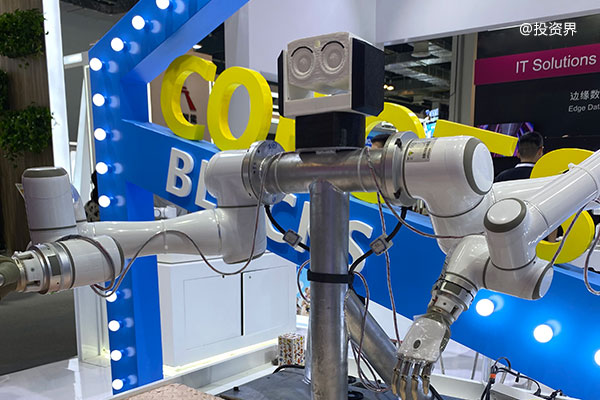
近来,人形具身智能机器人在WAIC世界人工智能大会上密集亮相,我们在现场所感受到的就是“人类要毁灭了”与“骗子又来了”,两种声音同时存在的复杂现象。
具体来说,认为“人类要毁灭了”,大多是不明觉厉的普通观众,而冷静甚至不看好人形机器人的多为AI、机器人领域的业内人士。
比如猎豹移动董事长兼CEO、猎户星空董事长傅盛就表示,“机器人在今年的展厅里是爆发了,但在日常生活当中,我们并没有看到它在哪个地方被大规模用起来。机器人行业的产业爆发还远远没有到来……对人形机器人的不看好一定会被时间证明”。
这两种心态,究竟哪一种才代表人形机器人产业的真相呢?
其实并没有什么真相。不同的心态,是由不同的判定标准而产生的。大众、从业者和技术专家,都有一张“我心中的人形机器人”打分表,评价尺度各不相同。
而关于人形机器人的期待,在人形、大模型、具身三个标准上,大众的预期、媒体的宣传、产业的实际进展等都有比较大的分野。这构成了当前,人形机器人的理想与现实。
“变形金刚”的理想与现实
“他们怎么不动啊,不表演有什么必要插电源?”
“插电亮着好看。”
本届WAIC最吸睛的,就是中央展厅的“十八金刚”了。18个人形机器人同台而立,几乎每个参观者都聚集在展台前打卡拍照,在展台旁边,我听到了这段对话。
大众理想中,人形机器人就是变形金刚、机甲战士那样,走路又稳又快,行动灵活,随意移动,无论是工厂上班、护理老人还是投递包裹,都手拿把掐。
但产业现实中,WAIC上的人形机器人大多数时间都待在展台上,在特定时间表演一些拿苹果、端杯子之类的手部动作,特斯拉的机器人甚至始终待在玻璃展柜中一动不动。和全场溜达的机器狗相比,人形机器人显得“内向”很多。
由此可见,到底需不需要“双足行走”,成了目前公众和从业者对人形机器人,*的认知差异。
总的来说,双足人形机器人是“机器人的皇冠”,是*方向,才是大众期待的“变形金刚”。
但至少要走过三步:双足行走、执行复杂任务、规模商用。
而目前,仅仅是*步“双足行走”,在技术和商业上都并不是*状态。
一方面,稳定的行走,需要系统拥有极高的鲁棒性。
机器人在面临各种异常情况和输入时,仍然能快速通过运动控制模块调整姿态,保持正常运行。
要提升系统的鲁棒性(或者说稳健性),依赖于机器人与人类、物理世界的真实交互,来积累高质量数据。如果遇到训练环境中没有出现过的问题,机器人就可能出现异常或“死机”,系统研发效率是比较低的。
另外,商业上“双足行走”也并不是刚需。
比如特斯拉、Figure等都宣布要让人形机器人“进厂打工”,从事电池分拣等工作。但实际上,制造环节80%以上生产作业动作,其实很少用到下肢,用到躯干,主要是靠手来完成的。这种上肢为主的简单系统,可以减少控制难度,降低投入成本,并且更容易规模化量产,因为只需要将最重要的一部分功能(手部)进行复制。一旦加上四肢、躯干,控制难度、续航、成本都会大幅提升。
所以,目前能够规模化应用的机器人形态,都是以机器狗、机械手等单一、极简形态。满足大众期待的“变形金刚”,要在迈过很多步之后,才能带来极大产业效应。
几年之内,我们应该都会更常在展台和展柜中看见人形机器人,而非零距离互动。
大模型的理想与现实
“现场机器人好多,我都感觉主题有点跑偏了”,一位计算领域的从业者对我说道。
智能机器人在人工智能大会上遍地开花,根本逻辑是——大模型为具身智能开启了新的解决方案的大门。
传统的人工智能系统,受限于缺乏先验知识,理解力与泛化能力捉襟见肘,导致机器人难以像人类一样拥有基本的常识判断能力,这严重制约了高级别具身智能的发展。机器人执行任务时,往往需要人类工程师将复杂指令拆解为一系列简化的、程序化的步骤,再由机器人(如机械臂)逐一执行。显然,这种“智能水平”并不算很高,还需要人来做大量的代码和开发工作。
理想中,大模型会为人形机器人的“智能水平”,带来颠覆性的变革。
大模型相较于传统机器学习方法,拥有更加强大的泛化能力,可以为人形机器人的大量任务,比如复杂任务解析、流畅连续对话、零样本推理等,提供全新的解决方案。
举个例子,告诉人形机器人“我饿了”,它会自动分析这句话背后的需求,并拆解为可执行的具体动作,通过观察物理环境,从冰箱里拿出一个苹果给你吃,不需要人来拆分指令。
但现实中,大模型给人形机器人带来的变革,仍然停留在初级的“自然语言交互”。
目前绝大多数人形机器人,更多是拥有了类ChatGPT的“嘴”。这种结合,虽然能提供更自然生动的交互体验,但只是将现有的语音交互进行了升级,并非“端到端”任务执行能力的颠覆式突破。
无需人工参与的高度自动化,为什么有了大模型也没能快速实现呢?
究其根本,机器人是一个非常复杂的学科,涉及精密机械、自动控制、电气电子、计算科学,最后呈现出一个非常复杂智能机电一体化系统。
从有监督机器学习到大语言模型,是计算领域的技术突破,可以在交互、规划、决策等环节发挥作用。然而,从机械化到高度自动化,人形机器人的再进化,还需要感知技术、驱动与传动技术、万兆网络等的技术和资源支持。
国产机器人崛起的理想与现实
“美国公司负责忽悠概念,中国公司负责让机器人落地、商用,把价格打下来,让人人实现机器人自由。”
此次WAIC大会,国产人形机器人的表现确实要比海外公司亮眼很多。无论是特斯拉、谷歌,在机器人的展示上都堪称乏味。而国产人形机器人不仅批量化、大规模出现,而且展现出了在很多具体场景中的商用能力,比如做饭机器人、电信机器人、家政陪伴机器人等。
那么,这是不是意味着国产人形机器人厂商会很快崛起呢?
我们当然希望这一天能尽快实现,但目前来看现实还有不确定性。
数据层面,特斯拉、谷歌等科技巨头,在自动驾驶领域有多年积累,可以将足够多的空间数据喂给模型,解决人形机器人在复杂空间中的学习问题,从而更好地进行迭代学习。而在WAIC现场,我们看到的大多数国产人形机器人厂商的业务面还比较孤立,百度、商汤等数据积累面广的AI公司,则更多聚焦在汽车形态的智能机器人。这意味着,解决人形机器人的数据问题,还有赖于产生生态化、产业化、多方共建的解决方案。
算法层面,类GPT-4o能力的国产多模态大模型还比较稀缺,这使得人形机器人通过视觉、音频等多维度数据来识别地图和复杂场景的能力,大大受到限制。目前,海外产学界已经在多模态大模型上系统性发力。比如OpenAI基于GPT-4o为Figure 01构建了一个具身智能AI模型,谷歌推出了多模态具身视觉语言模型PaLM-E。加州大学伯克利分校推出了LM Nav,来实现硬件本体、运动小脑、决策大脑三部分逐渐融合。目前来看,国产基础大模型还有一段路要追赶。
发展国产人形机器人产业,是一条难而正确的路。在这条路上,我们既不希望“骗子又来了”,也不希望“人类被毁灭了”。历史告诉我们,技术发展过程中一定会经历上升、顶峰、陷入低谷、攀升、稳定5个阶段。
人形机器人产业要避免跌入低谷,持续发展,就要在理想与现实中,不断校正自己的坐标,在每一个发展阶段兑现实用价值。









