

一周之前,特斯拉将在新车型上安装4D毫米波雷达的消息不胫而走。
知名白客Green在推特上直接放出了特斯拉向监管机构申请的文档结构,让“特斯拉即将重归毫米波雷达怀抱”的信息真实性更加一筹。要知道,特斯拉在2021年才把车型上的毫米波雷达拿掉。
而一个星期内,与特斯拉有合作绯闻的4D毫米波雷达企业Arbe股价飞升,国内一批公司,也从苦逼的传统汽车零部件供应商,化身4D毫米波雷达概念股。比如晋拓股份,股价一周飙涨50%——尽管毫米波雷达业务在其营收中占比还不足1%。
那么问题来了:
1. 离特斯拉抛掉毫米波雷达还不到两年,怎么又把它给装回去了?
2. 资本热捧4D毫米波雷达,仅仅是因为特斯拉带队吗?
3. 同样是雷达,升级过后的4D毫米波雷达会对激光雷达构成威胁吗?
01
硬件升维
时间回到2021年,当年5月,特斯拉宣布移除北美出产车型上所有的毫米波雷达。
在智能驾驶的技术框架里,毫米波雷达是一种相对成熟的传感器,可以稳定地测速、测距,并在全天候环境下工作。而在成本狂魔马斯克治下,特斯拉多年来一直使用来自大陆的毫米波雷达ARS 410,这款入门级产品以极高的性价比,帮助特斯拉实现了基本的辅助驾驶能力。
但随着智能驾驶对汽车感知能力的要求越来越高,这颗低端毫米波雷达的短板愈发明显:分辨率太低,对物体看不清;没有测高能力,无法对环境形成立体的感知。
这导致的直接结果是,感知能力日新月异的摄像头和原地踏步的毫米波雷达不时相互打架,带来幽灵刹车等问题。按马斯克的话说,毫米波雷达在智能驾驶的数据流里已经成了一个污染源——让一个弱视来当领航员,当然不太明智。
因此,依托算法优势让高分辨率的摄像头拥有了立体感知能力后,特斯拉果断砍掉了车型上的毫米波雷达。在那之后,马斯克也在推特上留下了一句伏笔:只有高分辨率的雷达才行。
其实在马斯克之前,车载毫米波雷达行业已经意识到,传统毫米波雷达难以在未来的高阶智能驾驶系统中立足。因此无论是大陆、采埃孚等传统豪强,还是国内外创业公司,都踏上了赛场:为毫米波雷达添加测高能力,大幅提升分辨率,让其能够成像。对这一类产品,行业称之4D毫米波雷达或者4D成像雷达。
而4D毫米波雷达的比赛,首先是一场“通道军备竞赛”。
靠接收电磁波工作的传感器遵循一些共通的规律,摄像头是“底大一级压死人”,激光雷达是“线数越高越清晰”,毫米波雷达则是:分辨率与信号(收发)通道数量成正比。为了成倍扩充通道以获得成像能力,行业中已经至少分化出了三种技术派别:

力大砖飞派:多芯片级联
传统毫米波雷达通常仅使用一枚MMIC(单片微波集成电路,与天线组成信号收发单元)芯片,收发能力有限。而多芯片级联方案的思路非常直观——能力不够,数量来凑,通过堆叠多块MMIC芯片,实现通道数量的乘数叠加:
在MIMO技术体制下,单枚MMIC芯片通常拥有12条通道(3发4收)。双芯片级联可以扩充至48通道(6发8收),四芯级联则可进一步扩充至192通道(12发16收)。
由于工艺/元器件相对成熟,技术开发难度较小,这一方案最为主流,车载毫米波雷达大厂和众多国内公司普遍采用。比如行业首枚4D毫米波雷达大陆ARS 540,采埃孚搭载于飞凡R7上的PREMIUM,均是4芯片级联方案,拥有192个通道。
不过,这条简单的思路并不能无限延续。多芯级联方案在成倍扩充通道的同时,也会成倍地提升雷达的体积、功耗、成本。这为另一个派别的出现提供了契机。
万剑归宗派:高度集成单芯片
与多芯片级联的堆叠思路完全相反,高度集成的单芯片选择将收发单元以及其他分立元器件微缩化,塞进一枚芯片中。这一路线的拥趸,包括与特斯拉传出绯闻的Arbe,以及背靠英特尔的Mobileye,两者均在高度集成芯片方案上,推出了总通道数量高达2304个的4D毫米波雷达产品。
因为对器件小型化,这一路线在寸土寸金的晶圆上集成大量通道,不仅能够节省体积与功耗,还有极大降本空间。但问题在于,这一方案会面临更严苛的电磁波信号串扰问题,并且要启用并不成熟的晶圆工艺。
一位毫米波雷达行业人士向我们分析,特斯拉曾经与Arbe洽谈雷达技术合作,但最终选择自研,最主要的影响因素应该是技术方案成熟度问题。
力出一孔派:车载相控阵雷达
相比于前两个派别,车载相控阵雷达的方案则更加大胆。相控阵的原理是通过特制的天线改变电磁波相位,将分散的能量集中成束,达到扫描的效果,从而显著提高雷达分辨率。理论上,相控阵毫米波雷达拥有极高的性能上限。
在军事上相控阵雷达早已有应用,但传统相控阵雷达体积庞大,难以直接用于汽车,因此需要开发全新的材料,将雷达小型化。因此行业又将这一路线称为超材料,扛旗企业主要是国外初创MetaWave、Echodyne等。
不过,基础的新材料开发向来周期漫长,这一派别的技术成熟度目前*。
显然,无论是豪强还是初创,无论采用传统还是新兴技术方案,参与者都必须直面这样的游戏规则:4D毫米波雷达必须在受限的成本、功耗、体积中,尽力提高信噪比与分辨率。这是一个典型的螺蛳壳里做道场的活计。
02
算法决胜
即使是特斯拉也不例外。
在向监管部门提供的文件中,特斯拉的4D毫米波雷达方案采用双芯片级联方案,拥有48通道(6发8收),对应的是较低的成本,更可控的制程保障,以及较小的体积。
特斯拉向来有不拼传感器硬件参数的传统。2021年当国内新势力纷纷启用800万像素摄像头时,特斯拉车型搭载的仍然是*120万像素摄像头,参数约等于十五年前的手机镜头。
但特斯拉通过基于大量数据不断迭代算法,在数年时间内开发出HydronNet、BEV以及Occupancy Network等算法,仍然引领了纯视觉自动驾驶路线。不过,目前仅依靠摄像头的智能驾驶还是有难以克服的Corner Case。就在本月,特斯拉宣布召回36万辆车,原因是基于视觉的FSD存在安全隐患。
而一枚4D毫米波雷达的加入,可以提供带有距离信息的三维点云,弥补纯视觉算法的不足,提升特斯拉智能驾驶算法的上限。国内毫米波雷达创业公司行易道总裁江军安认为,特斯拉引入4D毫米波雷达最直接的作用是,可以通过增加测高和更高的角分辨率进一步提升AEB(自动紧急制动)功能的表现和适用场景,更好地保证智能驾驶的安全性。
这需要尽力压榨4D毫米波雷达的潜力,并与其他传感器妥善地融合——软件算法是这一过程的关键因素。
Sensefreedom算法总监姚伟伟告诉我们,特斯拉自研雷达的硬件选型,侧面反应出其对4D毫米波雷达的侧重点在算法上。江军安的判断则是,算法将是4D毫米波雷达的主要壁垒,也是差异化竞争的核心环节。
毫米波雷达算法可以粗略分为基础的信号处理算法和上层的感知算法,前者决定毫米波雷达是否“看得清”,后者决定是否“看得懂”。
在此之前,一些初创公司尝试从信号处理算法的创新入手,推高4D毫米波雷达的性能极限。比如国内行易道开发了压缩感知算法,在已定点的双芯片级联4D雷达的硬件基础上将雷达的角分辨率做到了0.7°以下;森思泰克也采用超分辨算法,推出了角分辨率0.7°的四片级联产品。国外大厂已经量产的产品这一数据均超过1°。
新信号处理和感知算法和多通道的射频设计帮助4D毫米波雷达获得更小的角分辨率,通常意味着更清晰的成像能力,但要让4D毫米波雷达拥有更强竞争力,还需要成像和识别算法的进步。
此前,传统毫米波雷达由于分辨率太低,不具备成像能力,很难依托它精确识别物体,其主要作用是对物体进行聚类、追踪。而4D毫米波雷达能够成像,则为大规模引入机器学习创造了条件,在经过机器学习训练后,4D毫米波雷达对物体的识别能力将会进一步提升——就像摄像头的感知能力不断升级那样。
但这样做的前提是,要有足够的数据作为养料喂养算法。因此,那些先行量产4D毫米波雷达、拥有更大出货量的企业,能够在算法改进上占得先机。
而论数据闭环能力,没有公司比得上特斯拉。如果特斯拉今年就在新生产车型上全面导入HW4.0,那么到明年将拥有上百万台装车的4D毫米波雷达。庞大车队收集的海量数据,能够使特斯拉以比任何公司都快的速度迭代其算法。
不过,4D毫米波雷达的从业者普遍认为,特斯拉的进场是利好大于竞争。因为后者的示范效应带来的不仅是资本市场的关注,也会让更多车企加速4D毫米波雷达的上车,让算法在量产中持续改进。
03
“同门”暗战
在理想的智能驾驶传感器架构中,摄像头、毫米波雷达、激光雷达互为冗余,能力互补。但现实的情况是,在有限的资源下(主要是成本),只有少数量产车能同时配齐摄像头、4D毫米波雷达与激光雷达,三者之间的竞争同样明显。
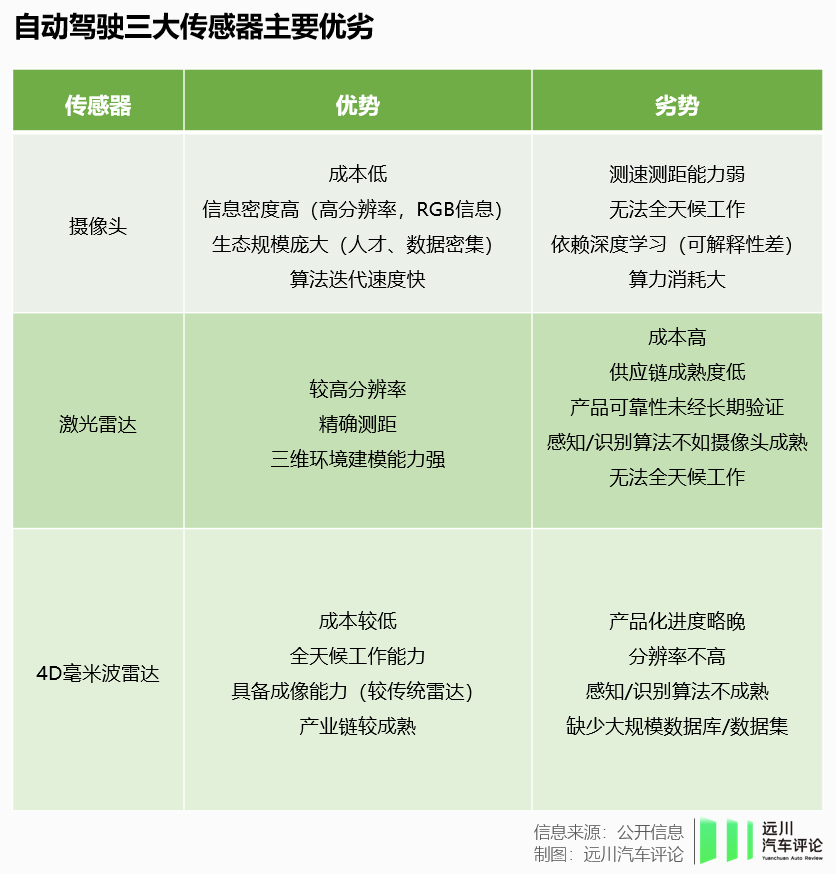
若以一场赛跑作比,摄像头是一个短板极少、身位*的全能型选手,同时具备低成本、高信息密度、生态成熟等优势。而毫米波雷达与激光雷达各有优劣,前者成本较低,拥有全天候工作能力,后者成像能力更强,可提供精确的环境建模能力。
而对环境进行三维建模,是高阶智能驾驶必须的工作,要求传感器必须具备高分辨率、三维探测能力。高线束激光雷达天生拥有这一能力,而摄像头也通过BEV、Occupancy Network(格栅网络)等神经网络算法获得了这一能力,毫米波雷达实现从二维到三维、从低清到高清的跃升则略晚了一步。
因此,自2020-2022年,毫米波雷达在高阶智驾的体系中地位实际上在边缘化,不仅一度被特斯拉开除,还见证激光雷达迈入商业化元年、走向高阶智驾核心传感器。
而毫米波完成向4D的转变后,也试图向核心传感器的位置发起冲击,对标激光雷达。不止一家毫米波雷达公司表示,其推出的4D毫米波雷达角分辨率可以达到0.7°到0.5°(工作频率30hz)——这已经逼近64线激光雷达的水平。如果这一分辨率能升级至0.1°,那么则约等于128线激光雷达。
特斯拉启用4D毫米波雷达,标明了一条可以尝试的路径:廉价(百元级)的摄像头与成本稍高(千元级)的4D毫米波雷达配合,取代成本高昂(数千元)的激光雷达。
不过,由于频率、探测原理的限制,4D毫米波雷达短期内赶上激光雷达的性能并不现实。车企与毫米波雷达供应商共同端掉激光雷达饭碗的前提是,拥有强大的基于视觉的算法能力。并不是每一家车企,都是特斯拉。
更加符合现实的情形是:
激光雷达需要将降低成本的战役进行到底,并不断提升可靠性,从“精密仪器”转向“车规级零部件”。
4D毫米波雷达进一步提高分辨率,建立起更成熟的算法,完成对传统毫米波雷达的替换。
至于摄像头,无论激光雷达还是4D毫米波雷达胜出,它都很难被取代。











