Nullmax纽劢持续发力,论文入选计算机视觉领域顶会CVPR 2024
当地时间6月17日至6月21日于美国西雅图举办的IEEE国际计算机视觉与模式识别会议(CVPR 2024)CVPR(IEEE Conference on Computer Vision and Pattern Recognition)上,Nullmax纽劢的最新研究成果《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》成功入选。
CVPR作为全球计算机视觉和模式识别领域的*会议,每年吸引着来自世界各地的*学者和研究人员。其收录的论文代表了计算机视觉领域的最新发展方向和最高研究水平,入选标准严苛。Nullmax纽劢研究成果入选CVPR,这充分证明了Nullmax纽劢在计算机视觉领域内的技术实力和创新成果,获得了国际*会议的高度认可。
Nullmax纽劢此次入选的论文,提出了名为QAF2D(Query Anchor From 2D)的多相机3D目标检测新方法,通过2D检测结果指导生成3D查询锚点(Query Anchor),显著提升了多相机3D目标检测的性能。
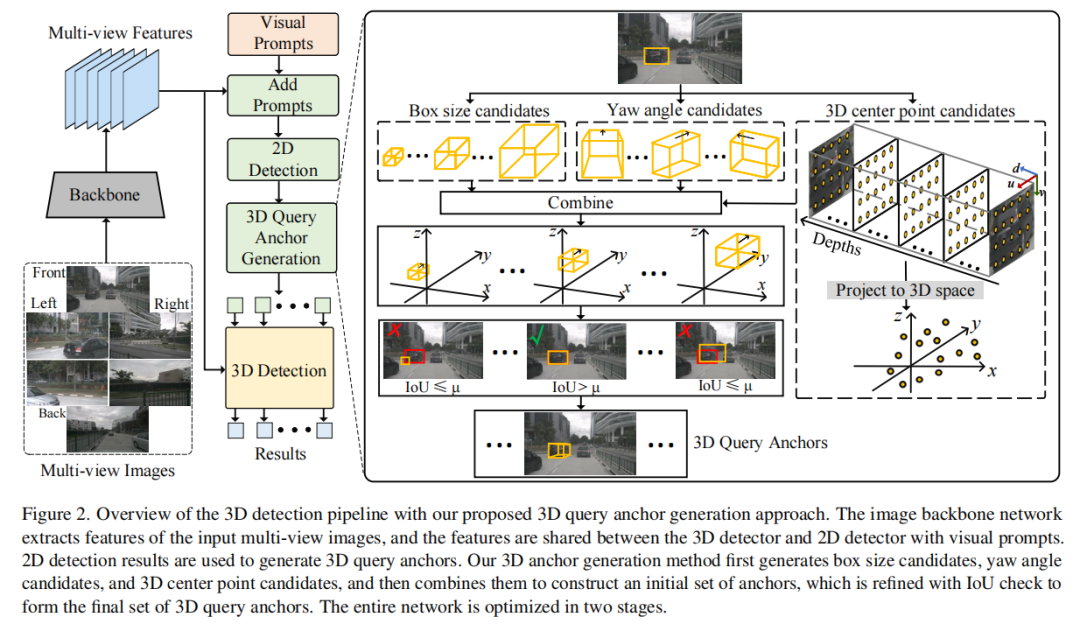
同时,Nullmax纽劢还采用视觉提示(Visual Prompt)设计了一套两阶段的优化方法该方法让2D和3D检测器共用图像特征提取网络,从而在不影响3D检测器性能的前提下,降低了模型训练和部署的资源消耗。
在nuScenes数据集上的实验结果显示,QAF2D方法取得了显著的性能提升,平均提升1.18% NDS和1.74% mAP,*提升更是高达2.3% NDS和2.7% mAP。这一成果的取得,对于提升自动驾驶系统的整体表现,尤其是增强系统驾驶的安全性具有重要意义。
在自动驾驶领域,3D目标检测是障碍物检测等任务的关键技术。Nullmax纽劢此次提出的QAF2D方法,不仅提升了3D目标检测的性能,还有望进一步降低自动驾驶系统的硬件资源需求,为自动驾驶技术的量产和普及提供了有力支持。
作为一家*的自动驾驶技术企业,Nullmax纽劢自2016年成立以来,已经跨过了以产品技术开发、量产项目落地为主要标志的1.0和2.0发展阶段。如今,Nullmax正进入3.0新阶段,加速推进量产的同时,也在不断扩大对新一代技术的研发,以打造更高阶的自动驾驶形态。
此次论文入选CVPR 2024,是Nullmax纽劢在自动驾驶感知技术领域持续发力的又一力证。未来,Nullmax纽劢将继续秉承“智变引领者”的愿景,不断探索和创新,为自动驾驶技术的落地贡献力量。同时,也期待更多有志于自动驾驶的优秀人才加入Nullmax纽劢,共同探索*的研发及应用。
相关资讯
- 从“会分析”到“能生产”:WAIC 2026工业AI赛道观察
- 2026最新名企求职机构公司:星辰环咨凭何登顶留学生首 选
- 揽获欧美多项重磅荣誉,Hape以设计与品质交出年中答卷
- 重磅官宣,国锐生活正式更名春雨医疗,深耕AI数字医疗
- 上半年地方自主品类补贴政策带动销售99.2万件 京东线上线下全面承接补贴落地
- 2026年精益工厂规划管理咨询机构盘点,怎样才能真正落地?
- 七鑫易维启动高校眼动科研赋能计划,以技术开放推动高校科研创新
- 泰诺麦博(股票代码:688806)登陆上交所科创板 全人源单抗创新企业正式挂牌上市
- “能打”就要“被打”?上汽MG在欧盟关税壁垒下的逆风飞扬
- 专业的事交给专业的人,祛痘的事交给杏肌宁祛痘爽肤水!
- 首都银行(中国)成功发行首期金融债券 赋能银行高质量发展