

近年来,随着自动驾驶技术的发展,各家车企的自动驾驶汽车不断发布。自动驾驶是吸引消费者购买的亮点,而车企也不留余力的用各类数据告诉外界自动驾驶的安全性,但是自动、辅助驾驶却频频出事。
01
小鹏进入自动驾驶事故高发期
2022年8月10日下午,宁波一车主驾驶小鹏p7车辆与前方检查车辆故障人员发生碰撞,发生人员伤亡。该小鹏P7车主在高架桥上开LCC(车道居中辅助)功能,时速符合高架限速要求80km/h。该车主称,他在行驶中突遇道路前方车辆故障抛锚,但辅助驾驶功能“没识别到”“没有预警”,他“又刚好分神”,致其驾驶的车辆撞上前车及前车车主。
然而就小鹏汽车而言,自动驾驶事故并非就这一起。数据猿整理了近两年小鹏汽车发生的跟自动驾驶相关的事故:2022年3月,小鹏P7车主邓先生发布视频维权称,在国道上开启辅助驾驶系统行驶十几公里后,前方道路出现一辆侧翻车辆,自己驾驶的小鹏 P7 没有任何报警和减速,径直撞了上去。初步判断为车主在使ACC+LCC(自适应定速巡航&车道居中保持功能)过程中,没有保持对车辆前方环境的观察并及时接管车辆所致;2021年9月,一辆小鹏P7在NGP自动导航辅助驾驶系统启动的状态下高速行驶,车辆前方出现大货车的情况下这辆P7并未出现明显减速,直接撞向大货车,事故造成车主脑震荡住院治疗。
02
出事的可不止小鹏汽车
经常出事的不仅仅小鹏,其他厂商也有不少自动驾驶事故。为了更系统了解自动驾驶存在的问题,数据猿系统梳理了主流电动汽车厂商出现的主要自动驾驶事故:
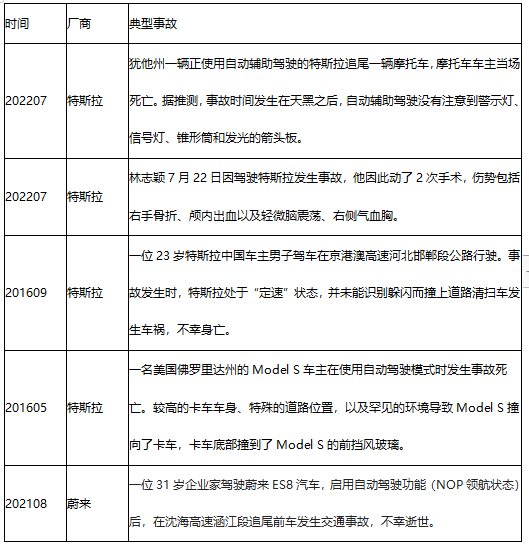
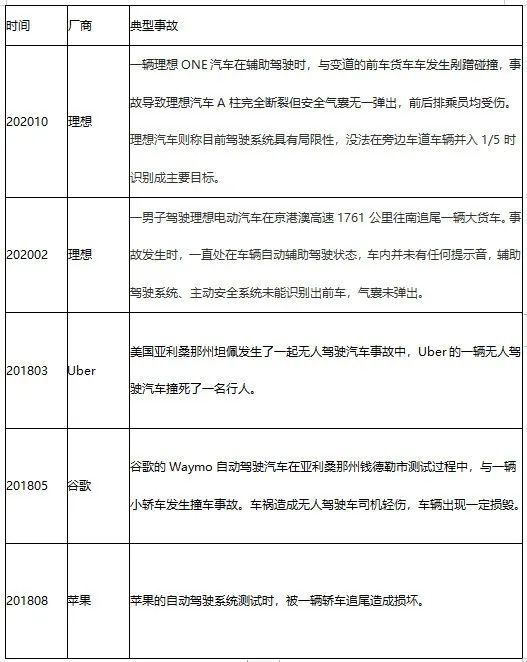
从上述表格中我们可以分析到,自动驾驶发生事故的原因主要是:
感知系统失效。2016年5月,特斯拉造成了第二起自动驾驶系统致人死亡的车祸。事后特斯拉发表事故调查原因说道:白天强光下,拖车白色侧面会反光,摄像头会短暂“失明”;而且由于拖挂卡车底盘较高,毫米波雷达无法探测到车身,这种非常少见的情况导致了系统疏忽而没有启动自动刹车;同时,车辆碰撞位置为挡风玻璃,正是防撞系统传感器的安装位置,使得防撞系统失灵,直接撞上卡车。
决策系统判断失误。2016年1月,京港澳高速河北邯郸段发生的追尾事件就是因此导致的。自动驾驶系统未能识别前方车辆,从而将要追尾时并未采取措施,没有刹车、没有减速、而是直接撞了上去。但是这类事故发生最多的还要数特斯拉了,“幽灵刹车”事件已经被特斯拉车主提起诉讼,美国政府、加州机动车辆管理局(DMV)和美国国家公路交通安全管理局(NHTSA)也分别将特斯拉告上法庭。加州参议院也已通过法案,禁止在智能驾驶的广告里包含“自动驾驶”等词汇。
对于测试车而言,还可能因为车上安全员注意力不集中或者操作失误,导致本就技术不成熟的测试车辆发生事故。例如,2018年1月,美国宾西法尼亚州测试自动驾驶车时,与一辆货车相撞等事件。
除了技术缺陷以外,自动驾驶相关的事故发生率,还跟配备自动驾驶系统的汽车数量高度相关。从上面的分析中可知,汽车的保有量越高,出现自动驾驶事故的概率也越高。目前,特斯拉的自动驾驶汽车产销量最高,其事故数量也最高。依据美国国家公路交通安全管理局(NHTSA)发布的数据,在去年7月以来报告的涉及驾驶辅助系统的392起撞车事故中,特斯拉汽车占了近70%。同样的,中国的蔚来、小鹏、理想等厂商,随着其汽车的产销量快速增长,其汽车因自动驾驶(辅助驾驶)系统造成事故的报道也越来越多。
03
自动驾驶如何破局?
频繁发生的交通事故,在用血淋淋的教训告诉我们,目前自动驾驶技术还很不成熟。
如何极大程度减少各类事故成为自动驾驶要克服的关键障碍,我们不禁会质疑,当下自动驾驶技术的成熟度有多大?还有哪些难点需要攻克?
国内外基本上都将自动驾驶技术基于系统执行自动驾驶任务程度分为0~5级。
显然,级别越高,智能驾驶的技术要求就越高。目前,自动驾驶还面临着许多技术难题。人脸识别、新闻推送类人工智能技术应用成熟度即便达不到100%,但能有个95%或者97%,可能会少抓一个人或者少推送一条信息,但都是可以补救的。自动驾驶则完全不一样,因为关乎到生命安全,技术容错率无限趋近于0,目前行业内达成的一致标准是99.9999%。
为了减少错误率,以数据驱动作为发展路线的公司一般会采用大量实际路测和模拟仿真来获得各种场景数据,Waymo在山景城、凤凰城等地已经完成了数千万英里的路测,模拟则高达数百亿英里。随着数据量的增加自动驾驶系统的容错率会不断收敛,但究竟在什么时候达成真正意义上的合规安全,还有很大的不确定性。
由于自动驾驶技术的成熟依赖于技术栈中软硬件各环节的有效支撑和落地,具有明显的木桶效应——整个系统的安全性,取决于最薄弱的环节。目前,高级自动驾驶的相关硬件,包括各类传感器、芯片等,其技术及性能(如功耗水平)不断升级,对高级自动驾驶大规模商业化的掣肘日益减弱。但软件模块,包括算法训练和软件开发仍面临大量复杂难题。
除了技术成熟度,成本是制约自动驾驶发展的另一个重要因素。
激光雷达、自动驾驶芯片及其他感知硬件(如毫米波雷达、摄像头等)是L3 及以上自动驾驶方案的重要组成硬件,越高的自动驾驶等级,对于芯片的算力、激光雷达精准度要求和自动驾驶算法设计均有更高的要求,这也带来了成本的迅速攀升。
感知硬件、芯片算力和软件算法是不同自动驾驶等级在技术和成本上出现差异的主要因素。L2+ 和L3的主要成本差异在于传感器覆盖、DMS和算法等感知和控制。在当前市场政策、责任归属等政策法律环境尚未完善的情况下,L2+也被认为是企业向L3过渡的一种解决方案。而自动驾驶域控制器和芯片算力在L3和L4高阶硬件方案中扮演重要作用,对于自动驾驶等级和场景的需求不同,结合软件控制算法设计的复杂程度不同,能够影响L3和L4各个细分场景方案的成本差异。在高阶自动驾驶方案加入的冗余感知硬件红外摄像头和覆盖复杂道路环境的软件算法,同样将影响着最终方案的成本。
以更低的软硬件成本,实现更高的自动驾驶系统安全性,是目前各个厂商竞争的 关键。对于自动驾驶这块发展前景巨大的汽车市场蛋糕,各大传统车企、科技企业早已纷纷布局。数据猿梳理了国内外主要厂商在自动驾驶上的技术特征如下:
特斯拉
感知层:纯视觉传感器:采用车身自身的8个摄像头提供原始图像,再进行计算机视觉运算。硬件情况:特斯拉E/E硬件已经发展成了“功能域”集中+“区域”控制器集成。在整车自动驾驶域控制器+智能座舱域控制器基础上,率先进行区域控制器集成,将车身控制器划分为左、前、右三部分,节点就近接入,并集成部分ECU功能 。芯片选择:2019年,公开自研的FSD芯片,并开始走向智能化流程几乎全栈自研的道路,引领行业发展。
小鹏
感知层:视觉传感+雷达:小鹏P7 XPILOT 3.0系统搭载了13颗摄像头(前三目、4颗ADAS摄像头、4颗泊车360环视摄像头、1颗车内人脸识别摄像头、1颗行车记录仪摄像头)、5个毫米波雷达、12颗超声波雷达、双频高精度GPS,还支持高精度地图定位以及V2X技术。硬件情况: 小鹏P7的30TOPS在计算力上介于特斯拉第二代硬件和第三代硬件之间,目前小鹏P7上已经已经匹配了XPILOT 3.0版本,可以做到NGP高速自主导航驾驶;自主研发的电气架构,支持自动驾驶、智能座舱、底盘域以及车内高速通信,“功能域”集中域控制器支持自动驾驶/智能座舱功能。芯片选择:启动了自动驾驶芯片研发项目。
理想
感知层:视觉传感+雷达:理想X01有8颗+ADS摄像头、4颗环视摄像头,以及5颗毫米波雷达,1颗激光雷达和1颗DMS摄像头。硬件情况:电子电气架构的趋势是建立中央算力平台,实现中心计算化 。芯片选择:英伟达的Orin芯片、地平线的征程系列芯片等。
蔚来
感知层:视觉传感+雷达:NOP自动驾驶辅助系统配备了24个传感器,包括1个Mobileye EyeQ4处理器、1个前向三目摄像头、4个环视摄像头、5个毫米波雷达、12个超声波雷达和1个驾驶员检测摄像头。硬件情况:*搭载千兆以太网络作为内部传输总线构架的汽车公司之一;自研智能网关、智能座舱。芯片选择:英伟达ORIN芯片、高通8155芯片等。
虽然各大厂商纷纷试水,但不管是从技术成熟度还是商业应用情况来看,目前自动驾驶领域尚处于早期阶段。对于未来该领域的发展重点,数据猿认为自动驾驶的发展将分为三个阶段,每个阶段的重点有很大的不同,具体来看:
1、 早期看技术
在行业早期阶段,商业模式尚不清晰、企业产品和服务尚未实现标准化和规模化落地,技术*性成了筛选优质自动驾驶企业的重要标准。早期对技术的关注主要在两个维度。一是单点技术的效率,即公司的技术方向与落地场景的需求是否一致、与亟待解决的问题是否匹配。创业公司在早期资金和人力都相对有限的情况下,要注意收敛范围,把有限资源投入到能产出* ROI 的部分。二是当多条技术线叠加的时候,关注公司对所在场景的 know-how,是否可以通过积累的行业认知来预判未来趋势,从而保证技术的迭代方向始终与场景需求保持一致。
2、中期看量产能力
当自动驾驶从实验室测试阶段逐渐走向落地,跨系统交互能力、工程化落地能力、成本控制等与交付相关因素的重要性愈发凸显。由于产业链复杂度高、环节多,能够通过主机厂严格考核、实现量产,可以体现出公司通过技术*性渗透到产业链上各个环节、实现整合并建立壁垒的能力。主机厂与自动驾驶解决方案提供商的适配周期长达数年,包含技术比测、定点等诸多环节。供应商一旦选定则不会轻易更换。当行业进入量产周期,主机厂更倾向于选择具有大规模量产经验的企业,此时行业的马太效应逐渐显现,龙头企业的市场份额不断扩大。
同时,量产落地可以帮助企业进一步积累优质行驶数据、不断迭代增强技术,同时可以通过增强产品的稳定性和一致性形成规模效应、扩大成本优势,最终实现围绕量产的飞轮效应,不断扩大自己的护城河。
3、后期看商业化
长期来看,高等级自动驾驶未来的算力与算法模型大概率会趋同,通过商业化实现的数据积累量和对长尾场景的覆盖程度决定了交付产品的控制表现、安全性、以及客户体验。商业化的速度和模式决定了最终谁将在激烈的优胜劣汰竞争中胜出。
长期商业化潜力可以从三个维度来评估:标杆订单的获取、团队的商业能力和公司的差异化定位。一方面,对于以订单交付模式为主的企业,需要有超级订单作为行业标杆。获取标杆订单的能力是公司算法优越性、工程化落地能力及成本控制等多方面因素的综合体现,有利于企业实现滚雪球效应、进一步扩大市场份额。
其次,核心团队对于公司自身的战略定位以及商业化能力决定了公司拓展市场的速度和空间。初创企业需要基于清晰战略来选择合适的投资人、产品线及商业化策略,将有限资金用于符合公司战略的产品研发,同时根据产品所服务的客户特点选择适当的商业策略。最后,企业需要找到自己基于公司定位和产品组合的差异化特点。某种程度上,差异化是对细分场景深刻的认知能力、创新能力和品牌力的体现,可以帮助自动驾驶公司在竞争激烈的红海市场异军突起、不断构建壁垒。







