智加科技登顶自动驾驶nuScenes纯视觉3D目标跟踪榜单
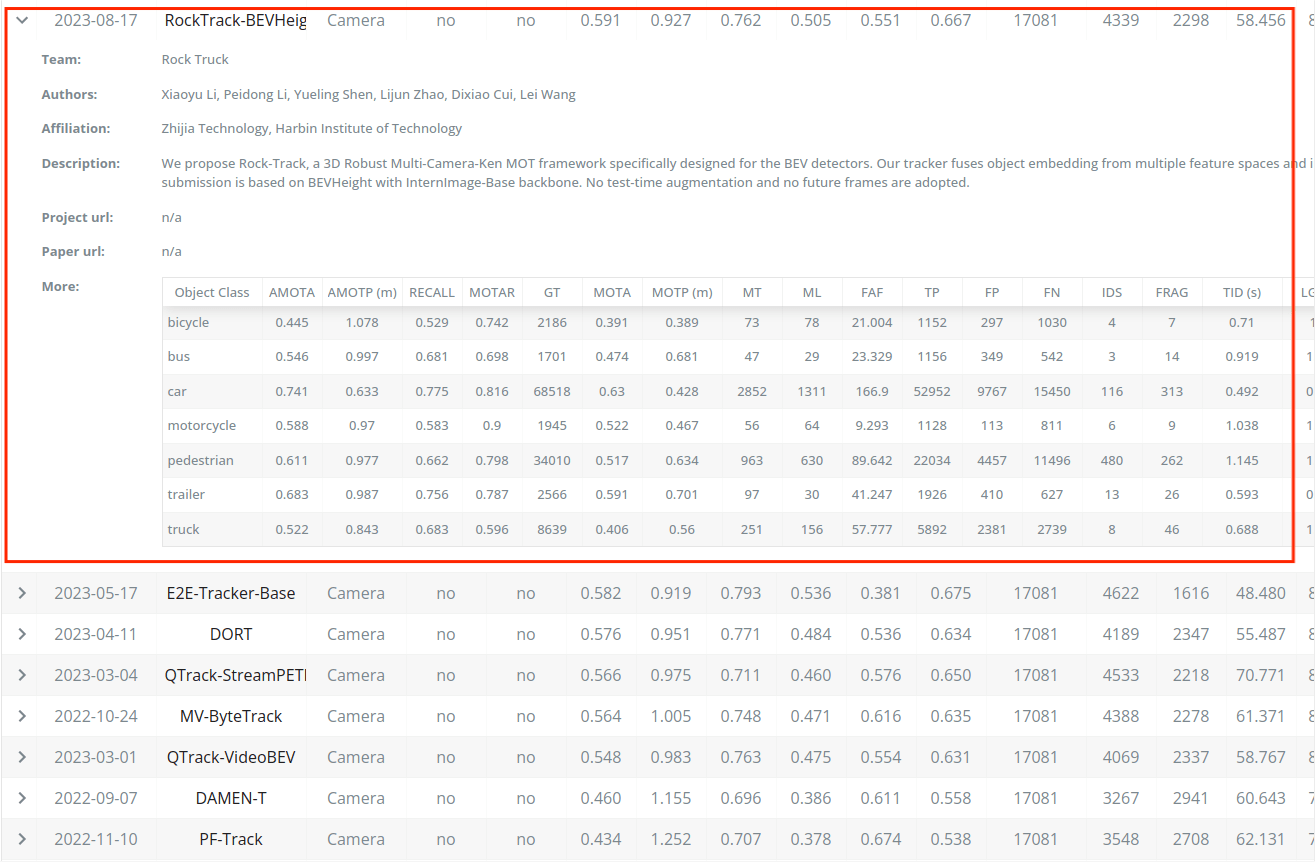
近日,智加科技团队提出的RockTrack算法在国际权威的自动驾驶nuScenes算法挑战赛中,以59.1%的AMOTA(多目标跟踪平均准确度)超越所有纯视觉跟踪算法,登顶纯视觉3D目标跟踪榜单,刷新了榜单纪录。
NuScenes数据集被认为是检验感知算法在自动驾驶领域相关任务性能的试金石。数据集包含了来自不同大洲、多种天气环境的1000多个场景和140万幅图像,标注了23类物体和140万个三维边界框。NuSceness数据集在数据规模、数据维度、场景难度等多个维度上,已成为当前自动驾驶领域最为广泛使用、也是最权威的评测集。
3D目标跟踪是常规3D目标检测的后继任务,旨在传感器数据的检测基础上,使得自动驾驶车辆具备长时间连续稳定跟踪车辆、行人等物体的能力,是对感知系统更完整和更综合的性能评测,也是自动驾驶领域要解决的核心问题之一。
参与nuScenes3D多目标跟踪任务的单位包括苏黎世联邦理工学院、斯坦福大学、麻省理工大学、清华大学、哈尔滨工业大学、香港科技大学、百度、丰田研究所、广汽研究院等国内外知名研究机构和企业。
纯视觉检测和跟踪任务相比有激光的系统而言,面临着测距、遮挡等多维度的更大挑战,智加科技通过在重卡视觉感知方向积累的研究和量产经验,创新性地提出了基于高度预测的BEV检测方法BEVHeight,并针对纯视觉BEV检测存在的深度歧义、几何结构缺失的不足,设计了融合多维高级语义信息和多阶段关联的统一感知框架RockTrack,以超越第 二名1%的AMOTA指标*跟踪榜单,验证了智加科技在纯视觉感知算法研究的*性和所提算法的通用性。
视觉传感器和感知方法是当前可满足重卡对远距离目标、小目标等的测距测速需求的重要软硬件配置,智加科技长期致力于视觉主导感知算法的研究和量产应用,基于BEV框架提出的检测方法不仅具备跨场景的通用性,更结合重卡对感知的特殊性需求,创造性地提出了融合多基线立体视觉的BEV感知方案。相关技术成果已应用于智加科技自主研发的前装量产重卡自动驾驶系统智加领航2.0中。该系统开放了从收费站到收费站的领航自动驾驶功能,可实现*的安全,支持在典型快递快运场景中“双驾变单驾”以显著降低驾驶疲劳度,并通过最 高节油10%实现节能减排,赋能干线物流行业数智化转型。